
Comparative Study of LiDAR SLAM Algorithms
Introduction
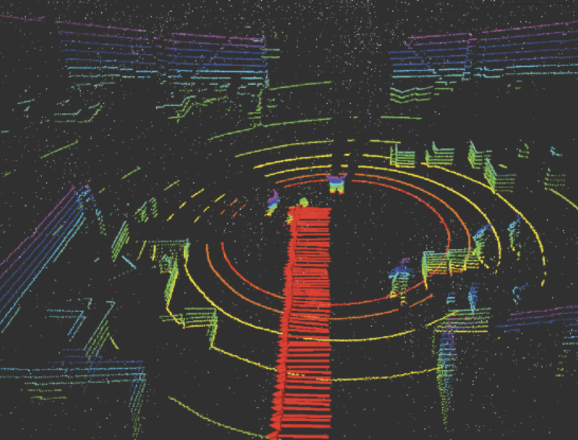
This project evaluates LiDAR-based SLAM (Simultaneous Localization and Mapping) algorithms in environments with reduced visibility, such as dusty mining sites. Dusty conditions introduce noise and occlusions in point cloud data, limiting the effectiveness of traditional SLAM methods. By enhancing algorithm robustness, this research aims to improve autonomous navigation in harsh environments.

Methods
Filter-Based Methods:
- FAST-LIO2 with Loop Closure: Integrates LiDAR-inertial odometry with pose-graph optimization for improved mapping in degraded conditions.
Graph Optimization-Based Methods:
- LIO-SAM: A tightly coupled LiDAR-inertial odometry method using Euclidean-distance loop detection and pose-graph optimization.
- ART-SLAM: Modular system integrating ground detection to optimize maps.
- GLIM: GPU-accelerated voxelized ICP for enhanced accuracy and efficiency.
Evaluation Metrics:
The ground truth odometry data is not accessible, so we cannot use the Absolute Trajectory Error metrics. Instead, the algorithms’ performances are evaluated through relative trajectory and map comparison. For trajectory comparison, we plot the trajectories generated by all the algorithms to visualize the trend and discrepancy between them. For mapping quality comparisons, we are inspecting the map density and consistency among results from different algorithms.
My Contributions:
- Literature Review on the state-of-the-art LiDAR-based SLAM algorithms.
- Implement FAST-LIO2 and GLIM with data recorded in dusty environments.
- Record map and trajectory results for comparison.
Results
Best Results after Dust Filtering and Algorithm Tuning:
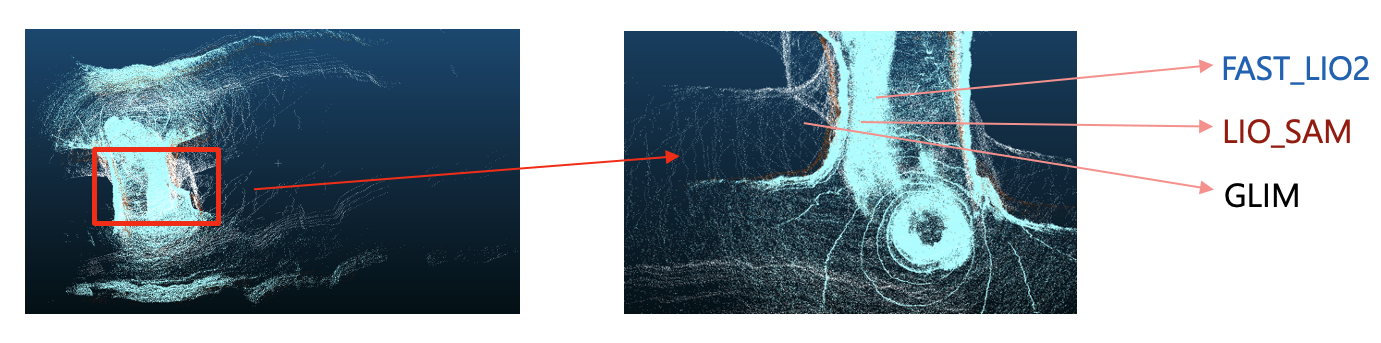
After applying the intensity-based and distance filtering techniques, we observed improvements across all three methods, though to varying degrees:
- LIO-SAM showed modest improvements in map quality, with better point cloud consistency in dusty regions while maintaining its feature extraction capabilities.
- GLIM’s performance improved but still showed some susceptibility to dust interference, particularly in areas of dense dust concentration.
- FAST-LIO2, while showing some improvement with filtering, continued to display significant artifacts from dust interference. The persistent noise in the map suggests that the current filtering approaches may not be sufficient to fully address the algorithm’s sensitivity to dust.
Discussion
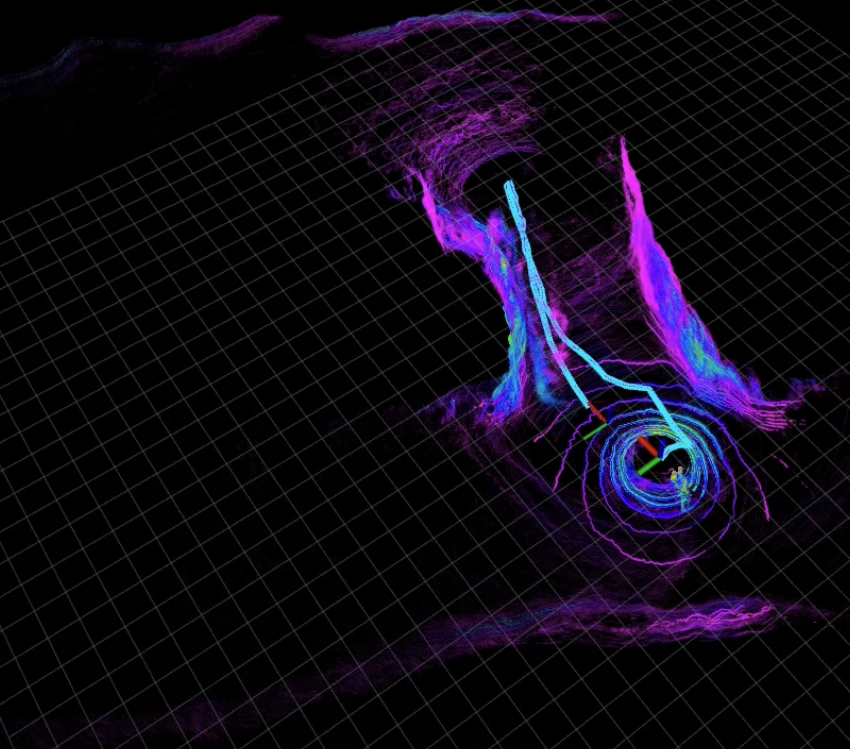
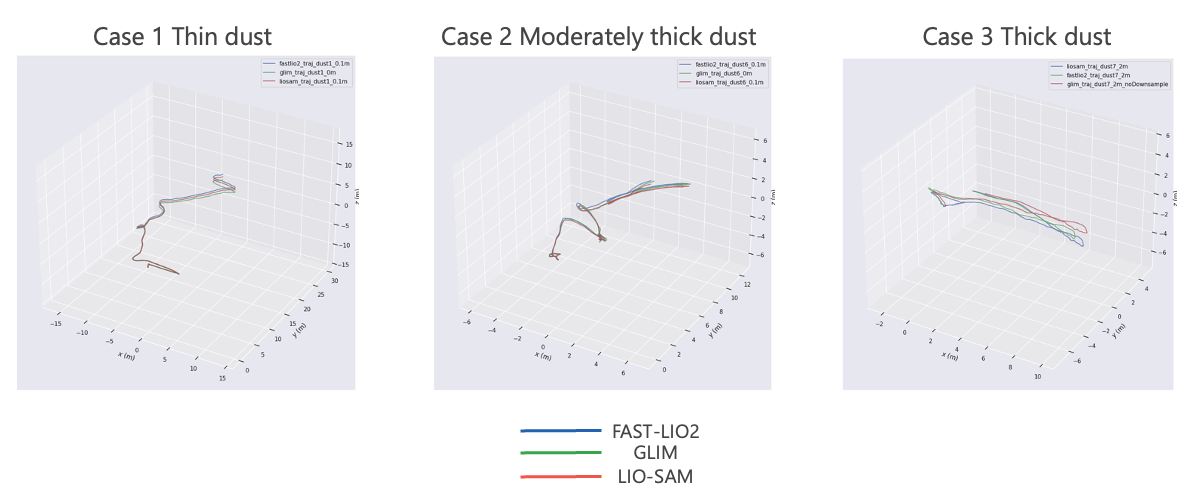
When running with the default settings of all algorithms, the results are collected and shown in Figures 7 and 8 below.
In the non-dusty environment, all the algorithms performed well, demonstrating high robustness and accuracy. However, in the dusty environment, GLIM exhibited significant drift compared to the other two algorithms, highlighting its vulnerability to dust-induced noise.
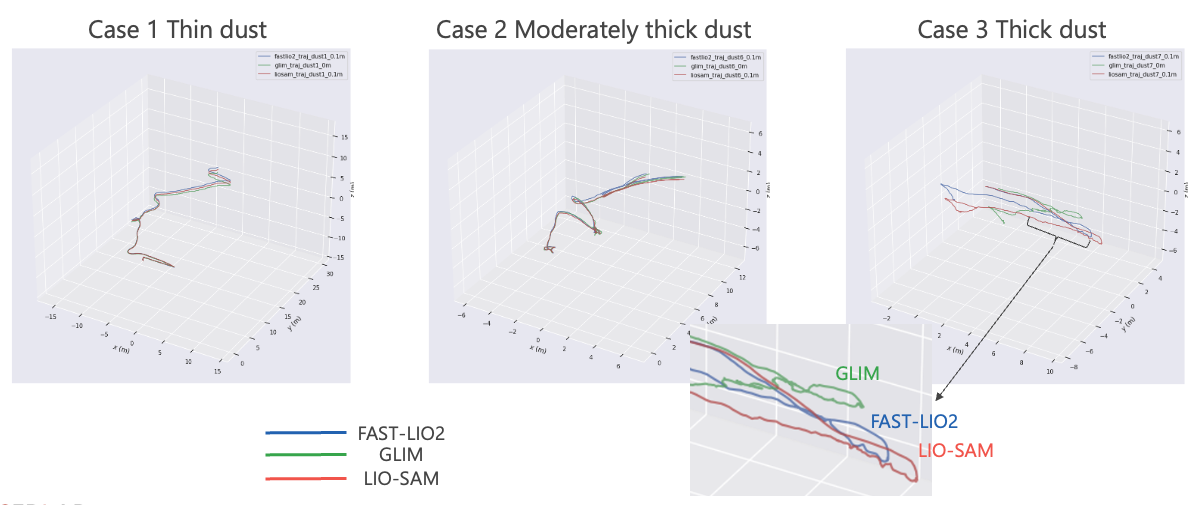
Effect of Downsampling Method:
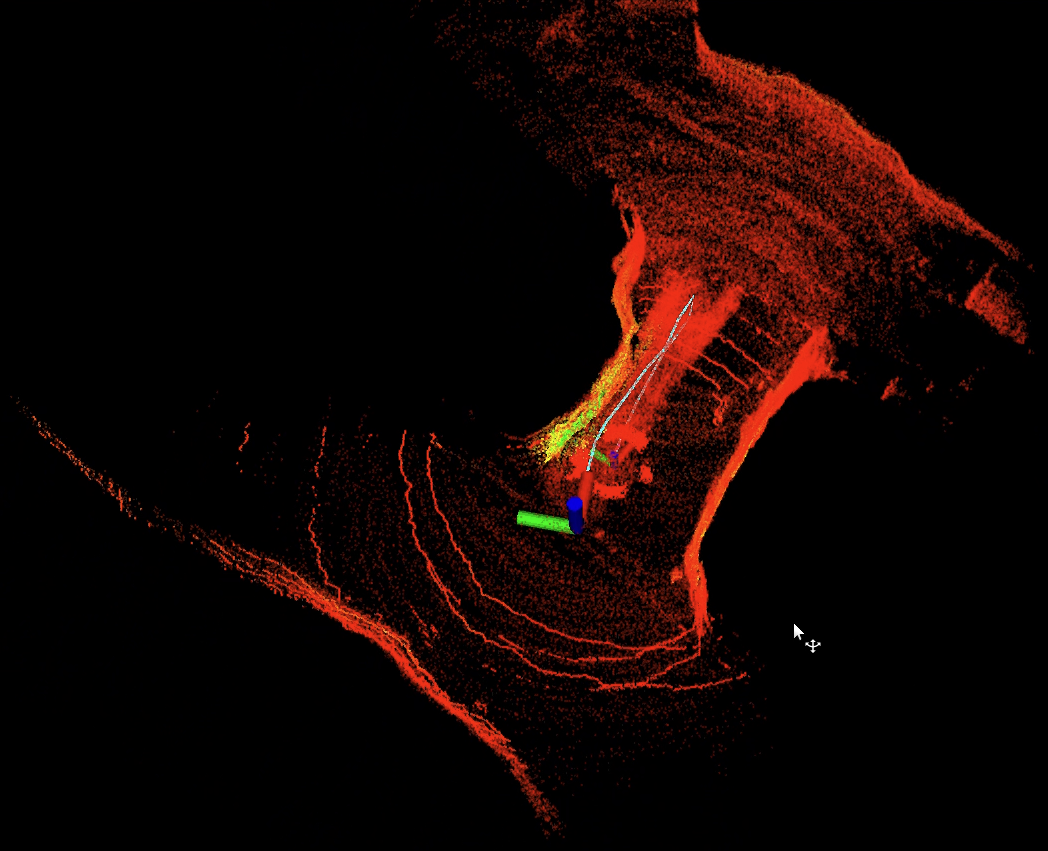
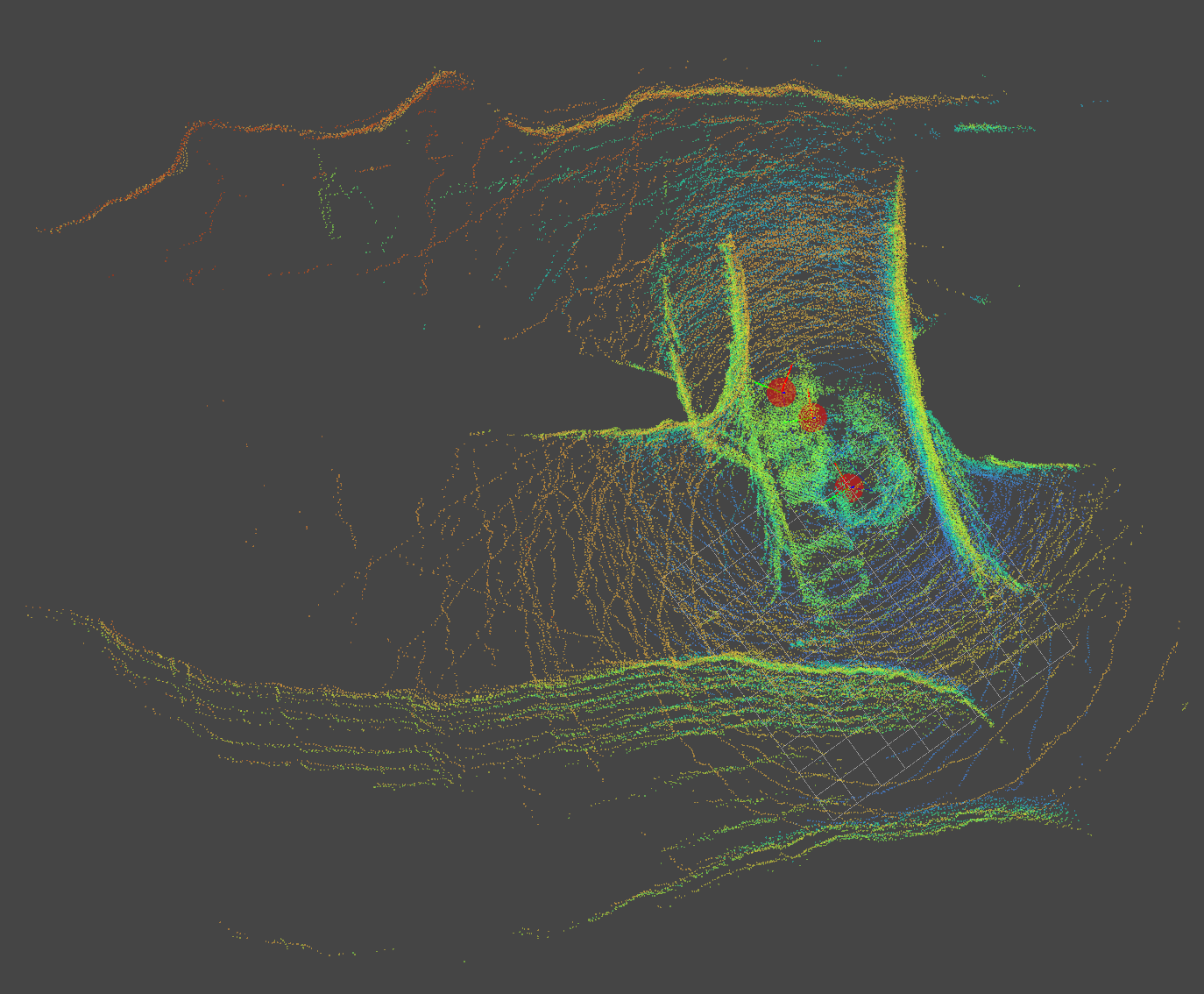
A key factor contributing to GLIM’s performance degradation in dusty environments is its reliance on a voxel-based random sampling strategy. Unlike voxel grid downsampling, which systematically preserves the geometric structure of the environment by computing a representative point (e.g., the centroid) for each voxel, random sampling selects points arbitrarily within each voxel. This randomness introduces inconsistencies in the downsampled point cloud, resulting in an uneven distribution of points and suboptimal data for surface-orientation-based validation. Such inconsistencies are particularly detrimental to GLIM’s Voxelized Generalized ICP (VGICP) method, which relies on accurate geometric representations for robust scan matching.
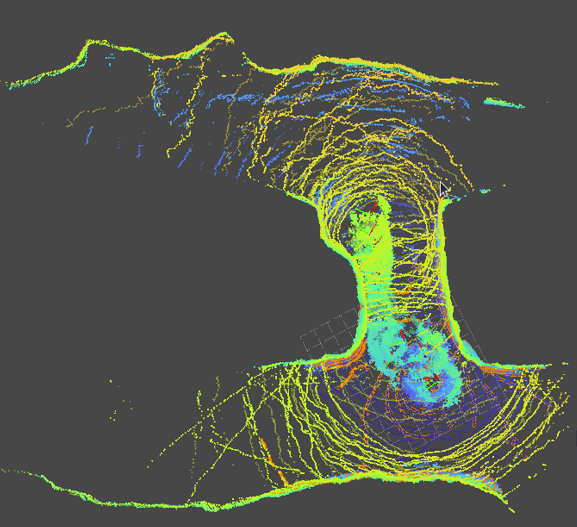
We opted to switch to the conventional voxel grid downsampling method, attributed to its ability to systematically preserve the geometric structure of the point cloud while also being well-suited to the relatively small size of our test environments and limited motion sequences in our dataset. This adjustment ensures a more consistent and representative point cloud for GLIM’s downstream processes, particularly in dusty scenarios. Figures 9 and 10 illustrate the effects of voxel-based random sampling and voxel grid downsampling respectively, highlighting the superiority of voxel grid downsampling in maintaining geometric structure and reducing noise in the processed point clouds.
Future Work:
In future work, we plan to conduct evaluations on datasets with ground truth trajectories to enable quantitative comparisons. Additionally, we aim to extend our analysis to larger and more dynamic environments, where multi-robot SLAM systems could mitigate challenges related to error accumulation and computational constraints. Exploring the integration of multi-sensor fusion techniques, such as combining LiDAR with thermal imaging or radar, will also be a focus to enhance SLAM robustness under extreme conditions. Finally, we will investigate adaptive filtering strategies tailored to specific environmental conditions, aiming to develop a generalized framework for improving SLAM performance in degraded settings.