Heterogeneous Exploration with HTG and Graph Voronoi Partition
Heterogeneous multi-robot exploration using a shared Heterogeneous Topological Graph (HTG) and Voronoi-based region partition.

Heterogeneous multi-robot exploration using a shared Heterogeneous Topological Graph (HTG) and Voronoi-based region partition.
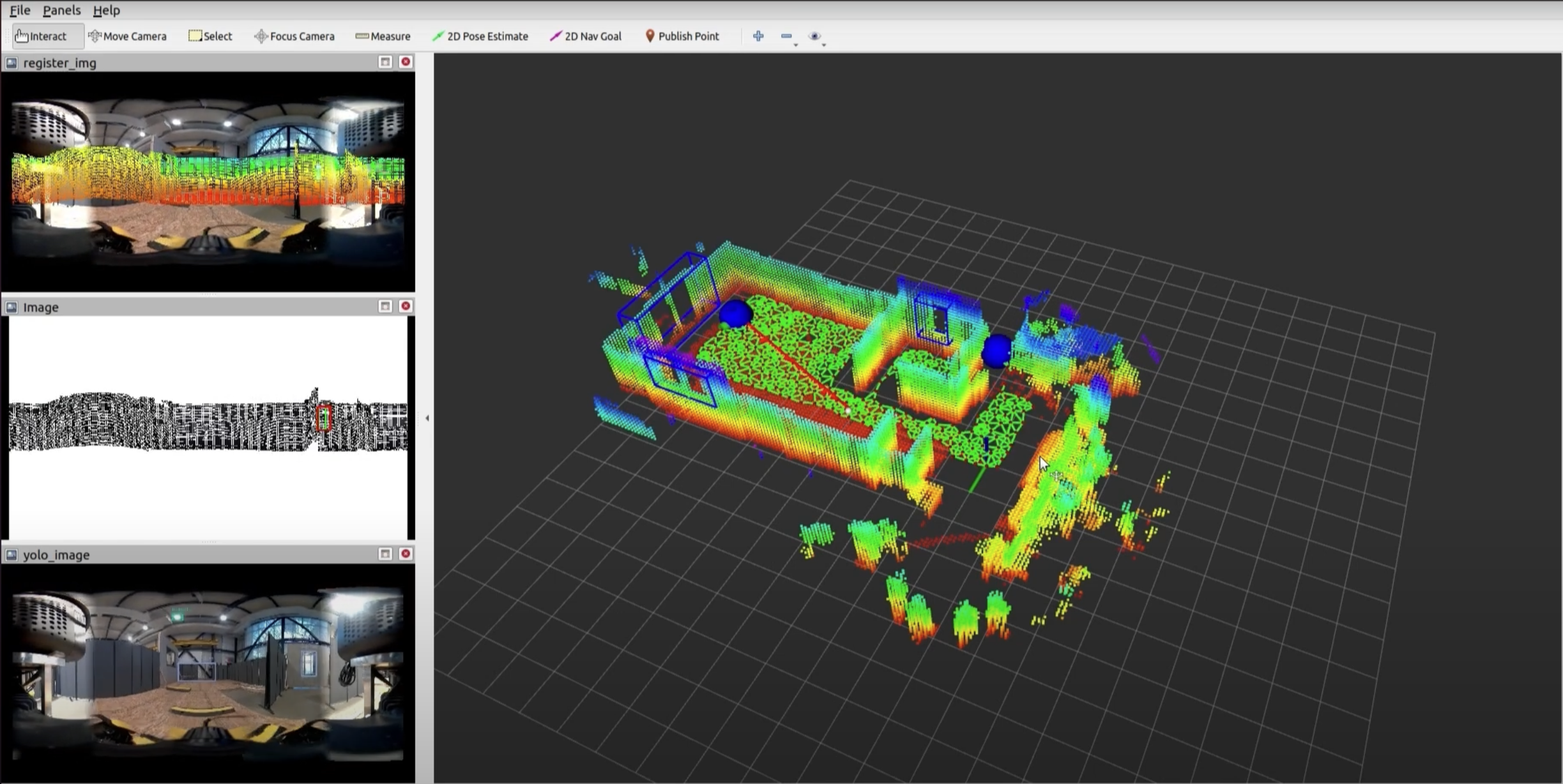
An integrated framework for semantic exploration and dense object-level mapping using panoramic LiDAR–camera fusion on a legged robot.

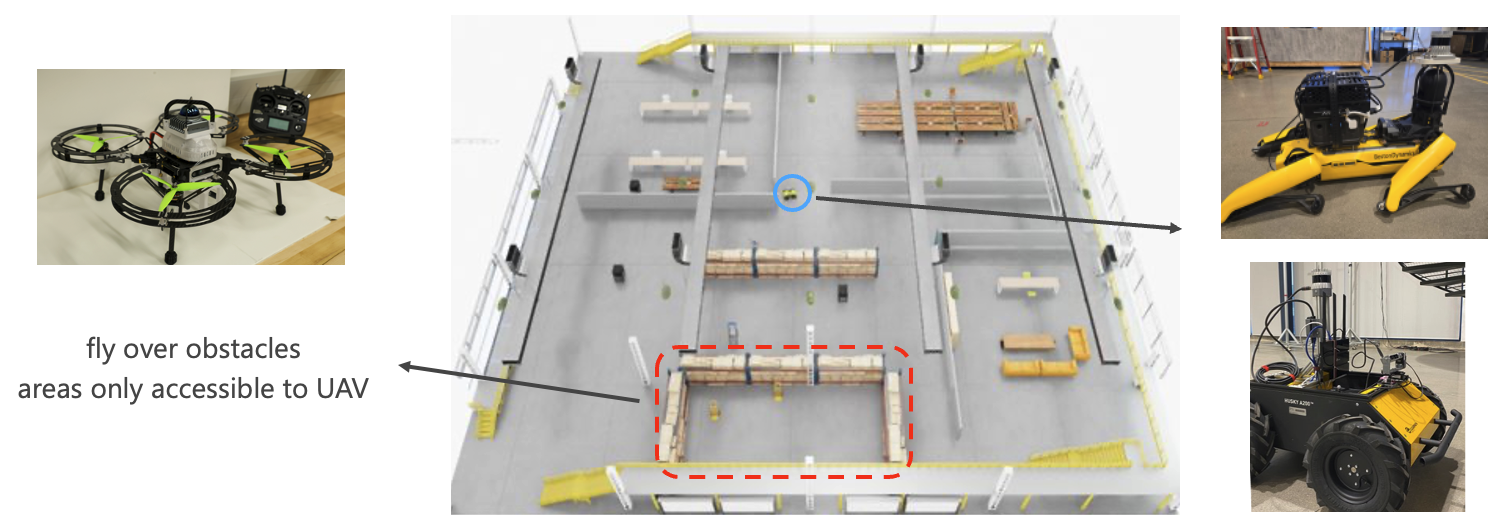
UAV–UGV exploration in Isaac Sim with region-level Conflict-Based Search (CBS), PRM–TSP global planning, and A* local execution.
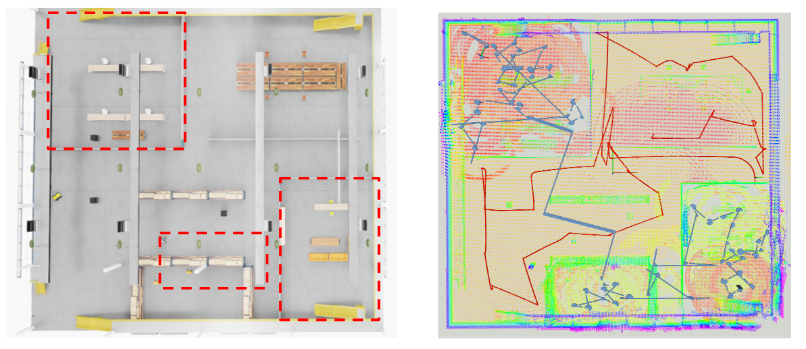
Evaluation of LiDAR SLAM algorithms in degraded environments with focus on robustness improvements for dusty conditions. 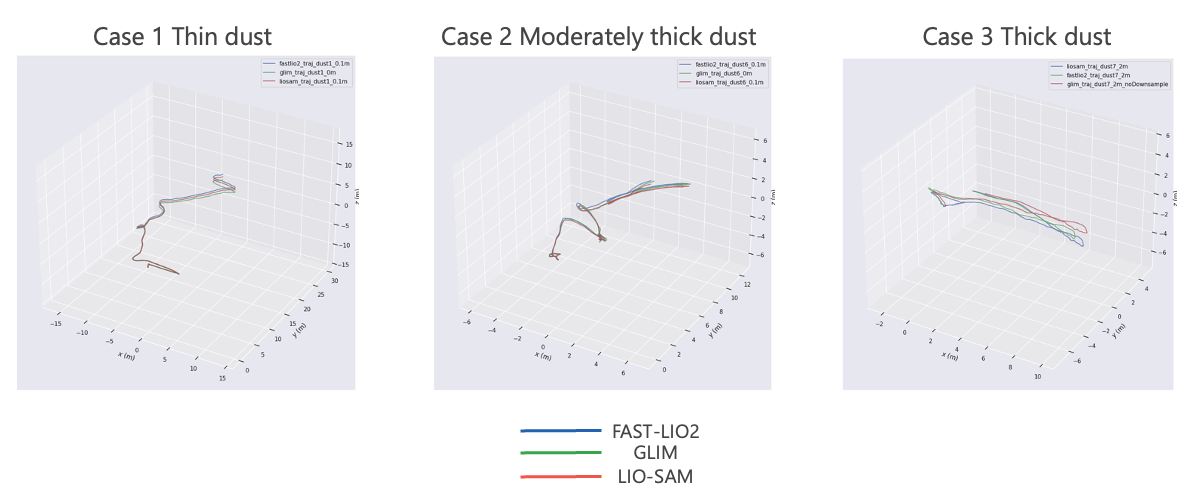
Sponsor-facing demonstration using the Spot quadruped for semantic exploration and progress tracking in mock construction environments.
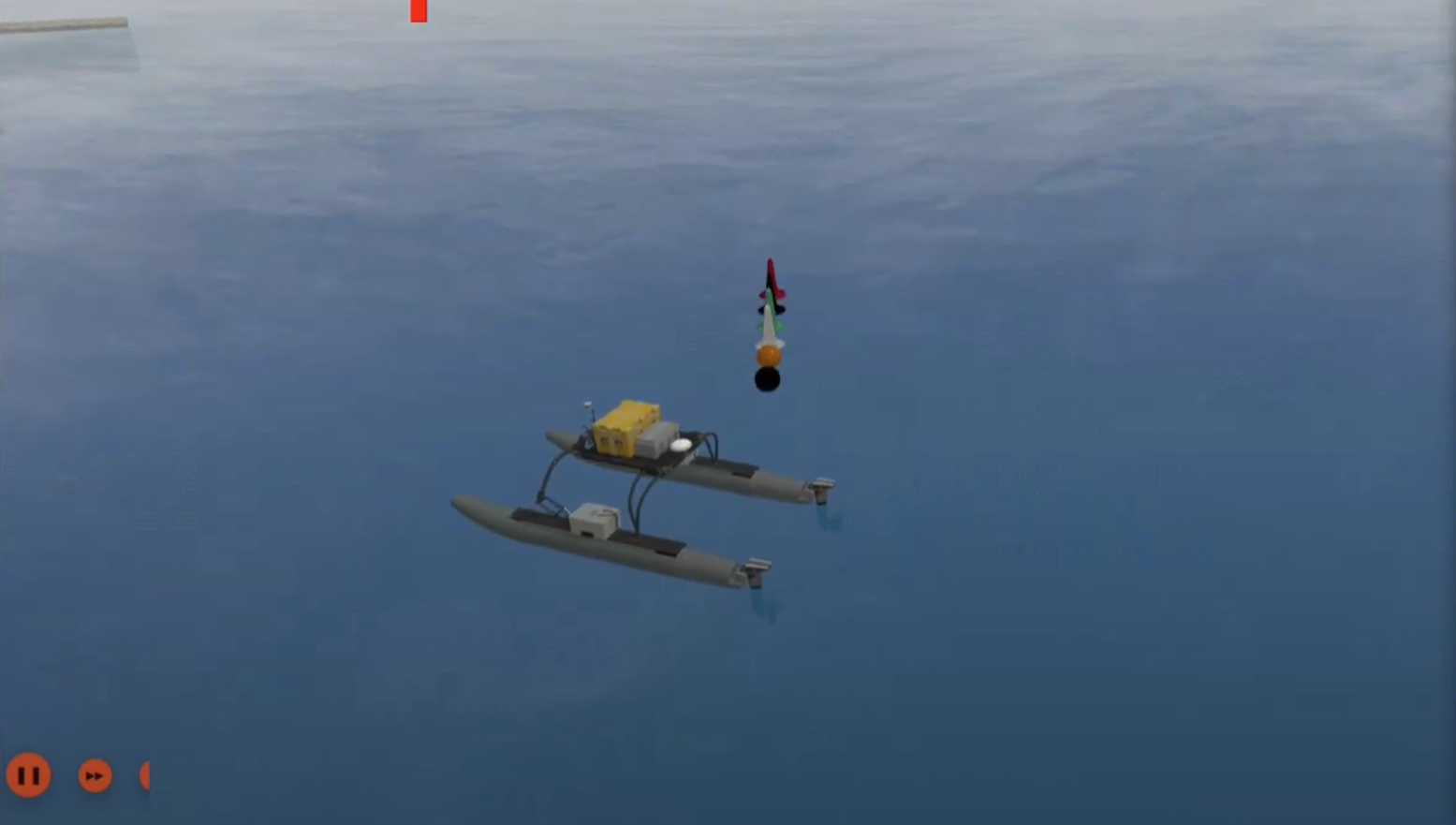
operate an autonomous surface vehicle (ASV) in a Gazebo-based simulation environment built by Open Robotics and the Naval Postgraduate School
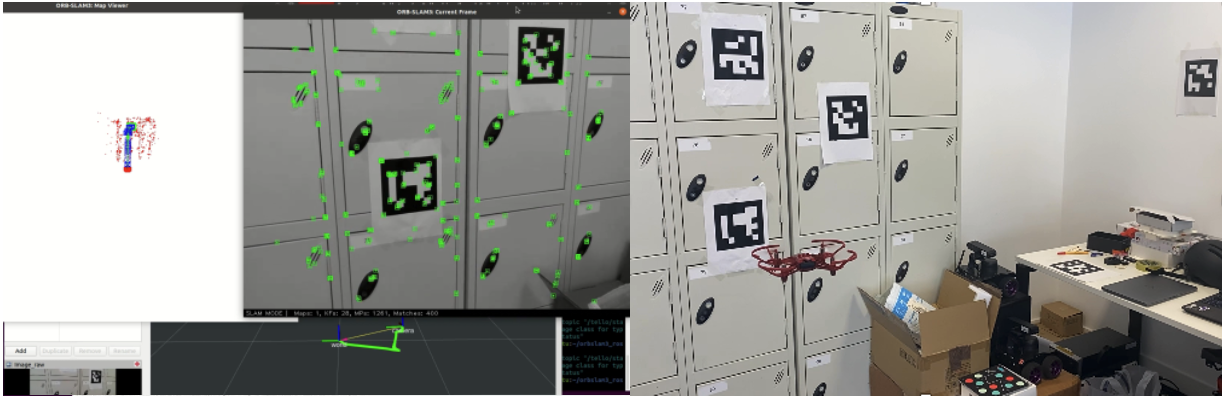
Fiducial marker based and ORB-SLAM based visual SLAM using DJI Tello drone (ROS2)
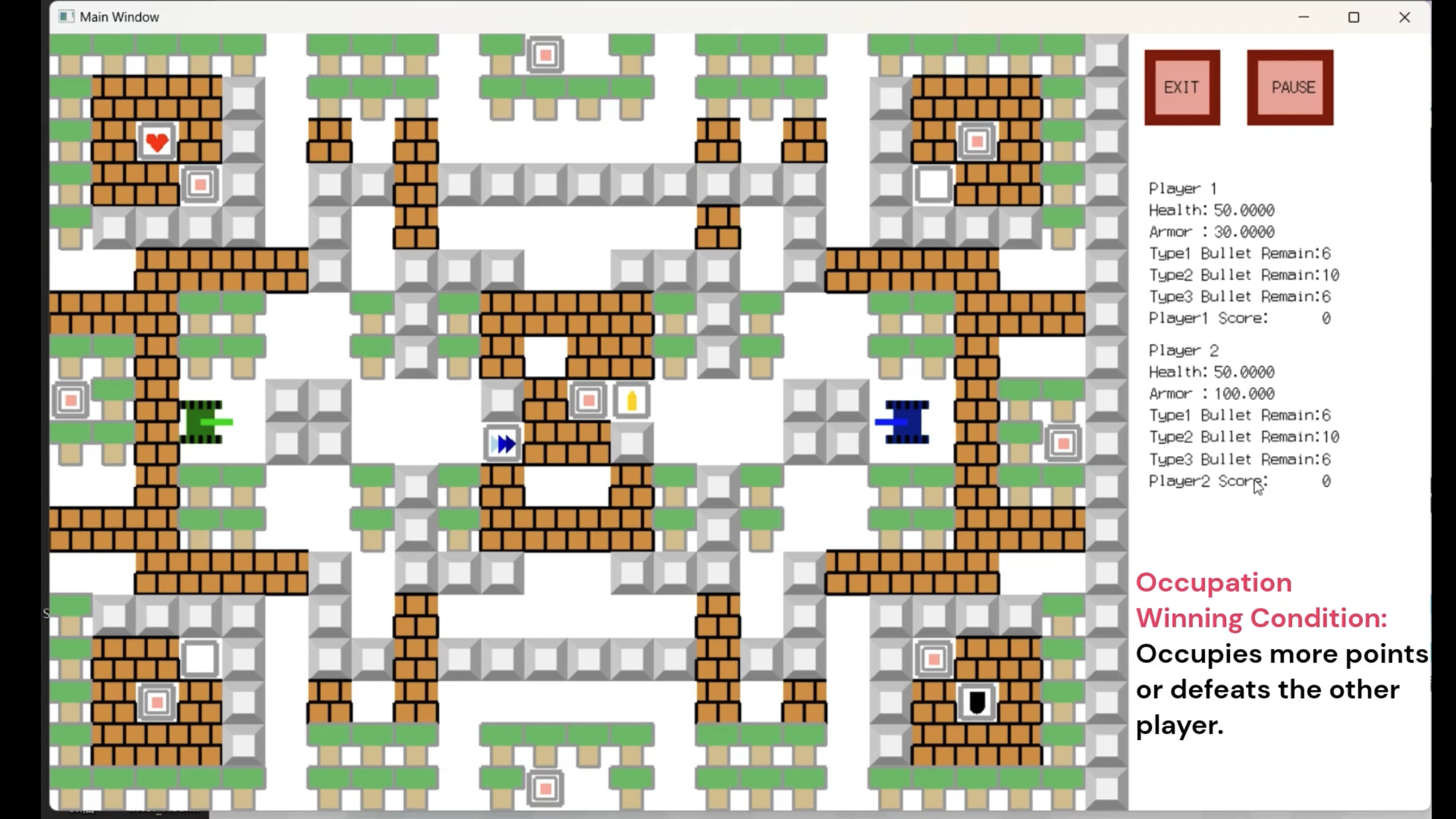
write a small video game based on Battle City using C++ and OPENGL
Developed and programmed a 3-DOF robotic arm capable of performing pick-and-place tasks using MATLAB for kinematic calculations and Arduino for control.

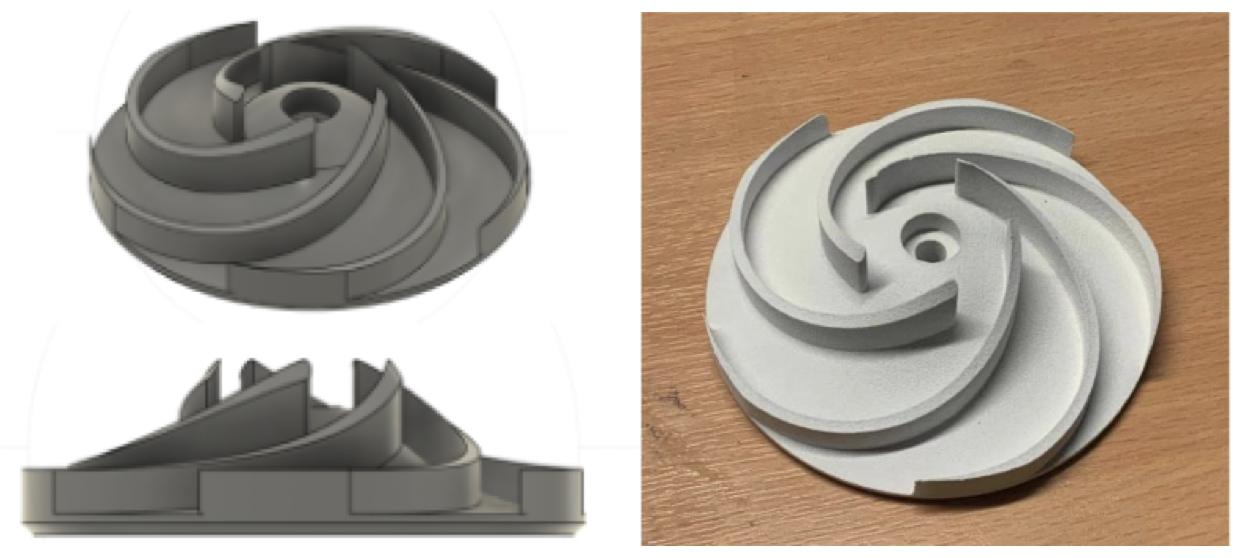
Prototype Design of a high-performance impeller in the pump of a Ventricular Assist Device (VAD).